
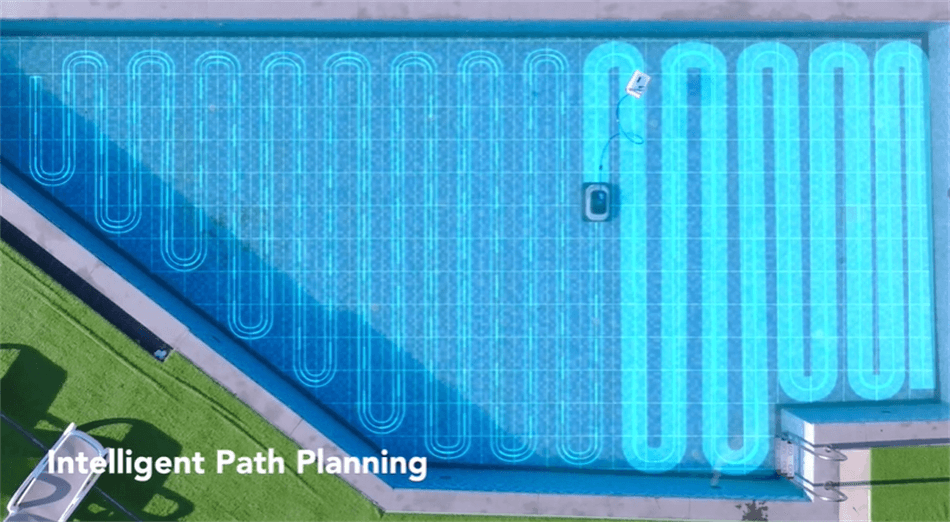
Avèk devlopman teknolojik robo sèvis, robo netwayaj pisin anba dlo yo lajman aplike nan mache a.Yo nan lòd yo reyalize wout planifikasyon otomatik yo, pri-la efikas ak adaptasyonultrasons anba dlo sòtidetèktè evite obstak yo endispansab.
VasMache
Jiska kounye a, Amerik di Nò se toujou pi gwo mache nan devlopman mache pisin mondyal la (Rapò sou mache Technavio, 2019-2024).Genyen deja plis pase 10.7 milyon pisin Ozetazini, e kantite nouvo pisin, sitou pisin prive, ap ogmante ane apre ane, ak yon ogmantasyon de 117,000 an 2021. An mwayèn yon pisin pou chak 31 moun.An Frans, dezyèm pi gwo mache pisin nan mond lan, kantite pisin prive te depase 3.2 milyon dola nan 2022. Ak kantite nouvo pisin te rive nan 244,000 nan yon ane, ak yon mwayèn de yon pisin pou chak 21 moun.
Nan mache Chinwa a, ki domine pa pisin piblik, an mwayèn apeprè 43,000 moun pataje yon jimnastik naje (gen 32,500 pisin nan peyi a, ki baze sou yon popilasyon 1.4 milya dola).
Espay gen katriyèm pi gwo kantite pisin nan mond lan ak dezyèm pi gwo kantite pisin nan Ewòp, ak 1.3 milyon pisin (rezidansyèl, piblik ak kolektif).
Soti nan konparezon mache mondyal la - Lachin pisin robo, gwosè mache mache Chinwa a se mwens pase 1% nan mond lan, mache prensipal la se toujou Ewòp ak Etazini.Done yo montre ke nan 2021, pisin mondyal robo mache gwosè a nan prèske 11.2 milya dola RMB, lavant de plis pase 1.6 milyon inite, se sèlman Etazini sou entènèt kanal la.Pisin netwaye anbakman robo yo te rive nan plis pase 500,000 inite nan 2021.Ak to kwasans yo gen plis pase 130%, ki te fè pati etap nan bonè nan kwasans rapid.
Koulye a, mache netwayaj pisin lan toujou domine pa netwayaj manyèl, ak nan mache netwayaj pisin mondyal la, netwayaj manyèl konte pou apeprè 45%, pandan y ap robo netwayaj pisin yo konte pou apeprè 19%.Nan lavni an, ak ogmantasyon nan depans travay ak popilarizasyon nan endistri teknoloji tankou pèsepsyon vizyèl, pèsepsyon ultrasons, planifikasyon chemen entèlijan, entènèt nan bagay sa yo, SLAM (enstantane pwezante ak teknoloji konstriksyon kat jeyografik) ak lòt teknoloji ki gen rapò, robo netwayaj pisin. pral piti piti chanje soti nan fonksyonèl nan entèlijan, ak pousantaj pénétration nan robo netwayaj pisin yo pral plis amelyore.
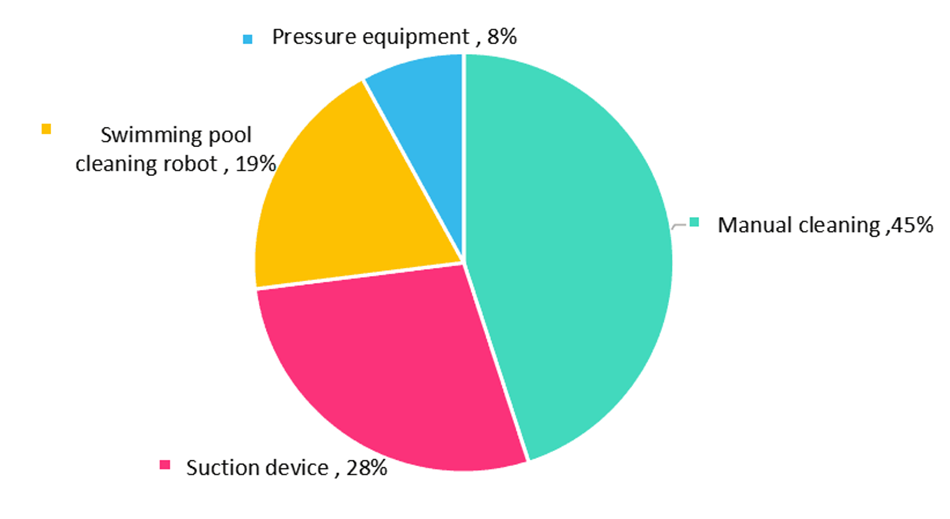
Pousantaj pénétration mache netwayaj pisin mondyal nan 2021
Dedye deteksyon, detèktè sòti anba dlo ede lanajepisin netwayaj robo pou fè pou evite obstak entèlijans
À anba dlo distans mezi obstak evite materyèl detèktè se yon jan de materyèl detèktè ki te itilize nan robo anba dlo obstak evite.Capteur a sèvi ak teknoloji ultrasons anba dlo mezi distans pou mezire distans ki genyen ant Capteur a ak objè a mezire.Lè Capteur a detekte yon obstak, distans obstak la retounen nan robo a, ak robo a ka sispann, vire, ralanti, navige miray la, monte miray la ak lòt operasyon dapre direksyon ki enstale pa Capteur a ak retounen nan. valè distans reyalize objektif otomatikman netwaye pisin lan epi evite obstak la.
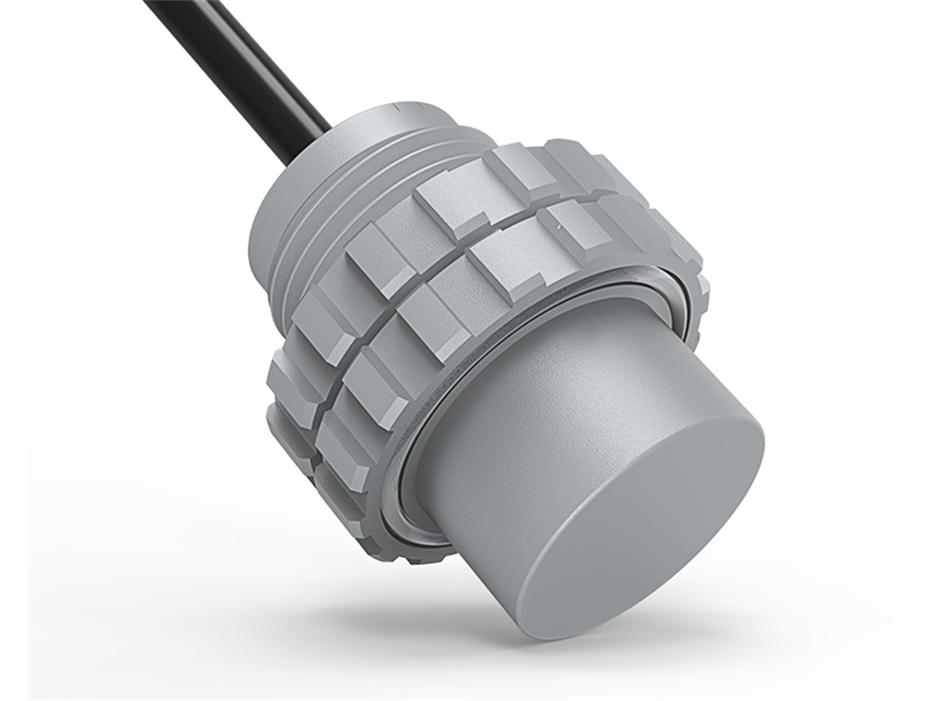
It vinihere——L08 anba dlo ranje Capteur
Layout kap pi devan nan Capteur DSP, rechèch endepandan ak devlopman nan detèktè ki sòti anba dlo, atravè konfigirasyon an nan detèktè ki sòti anba dlo nan robo nan anba dlo, se konsa ke robo nan netwaye pisin gen fonksyon an chemen planifikasyon evite obstak.
L08-modil se yon Capteur ultrasons anba dlo evite obstak ki fèt pou aplikasyon anba dlo.Li gen avantaj ki genyen nan ti gwosè, ti zòn avèg, segondè presizyon ak bon pèfòmans ki enpèmeyab.Sipòte pwotokòl modbus.Gen diferan ranje, Ang ak espesifikasyon zòn avèg pou diferan bezwen itilizatè yo chwazi.
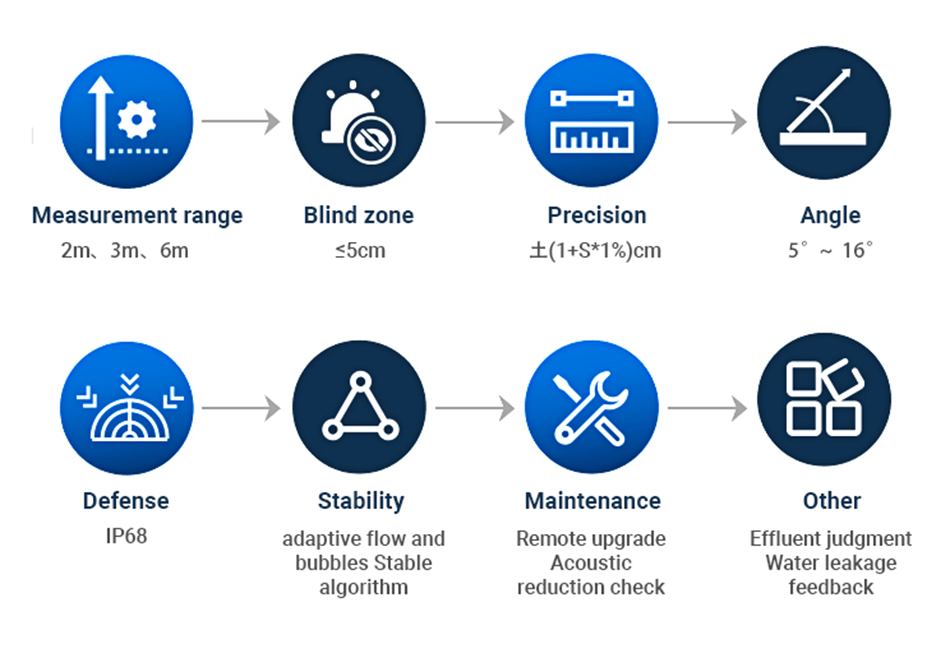
Paramèt debaz:
Vize pwen doulè yo, inove ak kraze
Ki jan yo pi byen otorize robo netwayaj pisin lan atravè Capteur a ki sòti anba dlo, epi reyalize dekouvèt teknolojik posib, entegrasyon nan chèn konplè nan sèvis ak solisyon. pwen doulè nan mache a ak inovasyon kraze nan.
(1) pri segondè, pa gen okenn fason yo popilarize aplikasyon an nan pwodwi konsomatè: detèktè deteksyon anba dlo ki vann nan kay ak aletranje, pri a se sòti nan dè milye de Yuan.Moun yo trè sansib a robo konsomatè nan pri, pou yo ka pa dwe lajman itilize kounye a.
Konbine ak egzijans sib pri yo nan robo konsomatè anba dlo, konpayi an poukont yo fè rechèch ak devlope paramèt matche transducer, lokalizasyon materyèl debaz yo, ak eksperyans pwodiksyon an mas.Pri a te redwi a mwens pase 10% nan endistri a, pyonye adopsyon detèktè anba dlo nan elektwonik konsomatè.
(2) Pòv konpatibilite nan paramèt Capteur sou mache a: yon Capteur se byen lwen, zòn avèg la piti, ak paramèt konpatib Angle a pa disponib sou mache a, ki souvan mande pou konbinezon an nan yon varyete detèktè, ak pri konbinezon an wo.
Devlope yon transducer milti-travès doub-frekans, ki rezoud paramèt yo-wo kalite distans, zòn avèg ak ang.
①Ang milti-gwo bout bwa a se fèmen nan 90 °, ak ranje a ka satisfè plis pase 6m, satisfè zòn avèg la nan 5cm, ak konpatibilite nan senaryo aplikasyon trè wo.
② Materyèl debaz nan Capteur ultrasons la se transducer plak seramik la, pwodwi a adopte frekans radial ak frekans epesè nan konplo konsepsyon entelijan plak seramik, ak Lè sa a, atravè adaptasyon kondwi a ak jwenn adaptasyon filtraj band-pas, frekans frekans sonorite radial. se ba, ang mezi a se gwo, frekans frekans frekans epesè a wo, pénétration a fò, distans mezi a se byen lwen ak paramèt yo nan zòn nan ti avèg yo te pran an kont.
(3) Nan anviwònman an konplèks anba dlo se enstab: lè gen dlo turbidity, gwo koule dlo, anba dlo zèb dlo limon, done yo Capteur fondamantalman echwe, sa ki lakòz robo a pa ka jije operasyon an entèlijans.
Pwoblèm nan itilize nan anviwònman an konplèks anba dlo rezoud pa konbinezon an entelijan nan doub-frekans milti-gwo bout bwa ak algorithm adaptasyon ak pwosesis filtre Kalman.Sipèpozisyon nan avantaj ki genyen nan diferan frekans, milti-gwo bout bwa kondwi entelijan, divèsifikasyon nan mòd k ap travay, pouvwa, ang, bon jan kalite siyal ka adapte yo ak chanjman sèn.
Estrikti pwodwi ak pwosesis:
(1) estrikti a se senp nan aparans, ti nan gwosè, enstalasyon sèlman bezwen mete twou a rekòmande nan koki a sere boulon nwa a, konekte done pwodiksyon nòmal nan ekipman an reprezante enstalasyon an se konplè;Pita antretyen sèlman bezwen vire sou nwa a yo retire Capteur a, operasyon senp, redwi pri a aprann nan enstalasyon ak antretyen.
(2) pwosesis la pwodwi, transducer a sèvi ak teknoloji ki pa gen kontak, estrikti fèmen entegre. Ak tout machin nan adopte konsepsyon pousye ak ki enpèmeyab.Kous entèn la sèvi ak po epoksidik lakòl résine konplètman vlope pwoteksyon, efè ki enpèmeyab ka rive nan nivo IP68.
Rechèchmwenndepandanlyepifonksyon serye
Nan pwosesis devlopman nan Capteur a, ekip R & D la repete optimize ak repete paramèt miltidimansyonèl tankou estabilite done, enfliyans koule dlo, frekans ak fabrikasyon.Ak fè tès miltidimansyonèl byen konbine avèk kondisyon aktyèl travay yo nan robo netwayaj pisin lan plis amelyore adaptabilite Capteur a nan anviwònman an ak kondisyon travay.
An menm tan an, Dianyingpu te toujou kenbe tranbleman nan teknoloji, anba dlo sòti Capteur kòm yon eleman mezi, konpare ak konsepsyon an ak debogaj, pwodiksyon ak kalibrasyon se pi enpòtan, synchronously devlope yon seri konplè nan anba dlo sòti Capteur tès ak sistèm kalibrasyon.
Ki baze sou tès la ak sistèm kalibrasyon, Capteur a sibi tès fyab tankou tanperati ki wo ak depo imidite segondè, tès cho ak frèt, tès espre sèl, tès UV akselere aje, tès gout toutouni, tès imèsyon likid (simule tès korozyon anba dlo) , tès vakyòm presyon ki enpèmeyab, ki se te pote soti nan chak iterasyon pwototip.
Apre Capteur a entegre ak kò robo a, yo teste pèfòmans tout machin nan pou dè milye èdtan an konbinezon ak anviwònman k ap travay aktyèl la nan robo la.Sede a nan Capteur sa a nan pwodiksyon an mas pi gran pase 99%, ki te verifye pa pratik nan mache nan pwodiksyon pakèt.
Akimile, L08 ap kontinyeaktyalizasyon
Revize chemen devlopman nan detèktè ki sòti anba dlo: rechèch, entegrasyon, inovasyon, verifikasyon.Chak ne se inovasyon nan brav, rechèch difisil, ak akimilasyon rich nan pouvwa nan jaden an nan teknoloji.L08 se premye pwodwi aplikasyon à anba dlo konpayi an.Konpayi an pral lanse plis pwodwi ki baze sou robo anba dlo evite obstak anba dlo ak eksplorasyon pwofondè.
Nan lavni an, ak pwomosyon nan robo anba dlo, detèktè ki sòti anba dlo kòm sipò kle pou deteksyon entelijan nan robo anba dlo, pral sètènman pote gwo chanjman nan endistri a robo anba dlo ak jaden.
Tan pòs: Out-04-2023