
Twalèt piblik entelijan yo se deteksyon entelijan ak sistèm kontwòl ki konte sou entènèt + entènèt nan teknoloji bagay sa yo pou reyalize yon kantite fonksyon lajan kach tankou konsèy twalèt entelijan, siveyans anviwònman entelijan, konsomasyon enèji ak jesyon koneksyon ekipman, operasyon aleka ak antretyen, ki ka bay. pi bon, pi efikas, pratik ak konfòtab sèvis pou itilizatè twalèt.
01Detèktè entelijan pou ede amelyore twalèt piblik entelijan
An tèm de konsèy twalèt entèlijan, itilize nan detèktè entelijan ka detekte lakoule total pasaje yoepikapasite akoupi,epi de done sa yo ka itilize nan ekspozisyon an entèaktif nan zòn piblik la, se konsa ke itilizatè twalèt ak administratè yo ka entwitif wè itilizasyon chak chèz twalèt pou gason ak fanm, itilizasyon twazyèm twalèt la ak chanm manman an ak ti bebe, e menm bay administratè yo gwo done pou predi dansite koule moun ak rasyonèl jesyon netwayaj.

Fig.1 Ekspozisyon entèaktif nan zòn piblik yo (bò gòch ak bò dwat)
Pou tou de trafik twalèt total ak lokatè koupi byen, nou ka amelyore presizyon nan gwo done yo ak amelyore eksperyans itilizatè fen a ak nouvo detèktè entelijan ki se
pi egzakepi genyenminimòm fo pozitif.

Fig.2 Dyagram chema deteksyon koupi byen detèktè LIDAR entelijan
02 Konparezon pèfòmans chak Capteur
Kounye a, pi fò nan deteksyon koupi byen sèvi ak tradisyonèl kadna pòt entelijan oswa detèktè enfrawouj, pandan y ap deteksyon patwonaj twalèt itilize detèktè enfrawouj ak kamera 3D.Yon nouvo kalite detektè lazè, ki piti piti vin pi konsomatè-klas nan pri ak elaji nan aplikasyon an, ka reyalize tou de deteksyon koupi byen ak estatistik patwonaj ak yon to presizyon ki gen plis pase 99%.Isit la se yon egzanp yon detektè lazè soti nan DianYingPu (R01 LIDAR) kòm yon egzanp, pèfòmans nan divès kalite detèktè sitou itilize pou deteksyon akoupi yo konpare.
| Kalite Capteur | Kadna pòt entelijan | Detèktè enfrawouj | Lidar |
|
|
| | |
| Enstale sou pòt twalèt piblik yo pou detèmine lokatè pa louvri ak fèmen pòt la | Enstale pi wo a twalèt la pou detèmine koule pasaje yo ak lokatè pa mezire chanjman distans | Enstale pi wo a twalèt la pou detèmine koule pasaje yo ak lokatè pa mezire chanjman distans | |
| Avantaj | Pa gen fo pozitif | Pa gen okenn modifikasyon adisyonèl ki nesesè Pri ki ba Pa fasil domaje | Pa gen okenn modifikasyon adisyonèl ki nesesè Pa gen fo alamPa gen restriksyon sou distans enstalasyon Idantifikasyon egzat nan objè nwa Pa gen fo alam |
| Dezavantaj | Frajil | Fo alam gen tandans | Pri yon ti kras pi wo |



Tablo I. Analiz de fòs jeneral ak feblès nan pèfòmans Capteur
Pou amelyore presizyon nan deteksyon koupi byen oswa deteksyon koule pasaje yo, detèktè pèfòmans segondè ki gen pèfòmans ki estab ak to alam ki ba anpil yo nesesè.Lasa a se yon konparezon nan pèfòmans nan ranje nan plizyè detèktè enfrawouj ak DianYingPu R01 laLidar detèktè.
Mezire byen lwen
Nan nouvo minisipalite oswa renove, tach panoramique, otowout, ayewopò ak lòt okazyon pou twalèt piblik entèlijan, ak R01.Lidar detèktèPou reyalize akoupi deteksyon an ak fonksyon estatistik koule pasaje yo, yo p ap sijè a tradisyonèl enfrawouj Capteur enstalasyon wotè restriksyon (jeneral Capteur enfrawouj mande pou kontwòl wotè enstalasyon an nan 2m, andedan kay la pa gen okenn sitiyasyon limyè anbyen fò).
R01Lidar detèktètès preliminè sou diferan objè ki gen koulè objè, ki gen ladan objè ki gen koulè nwa, jiska yon distans plis pase 3 mèt.Detèktè enfrawouj konvansyonèl yo ka sèlman mezire jiska apeprè 1 mèt.
B.Presizyonnan mezi
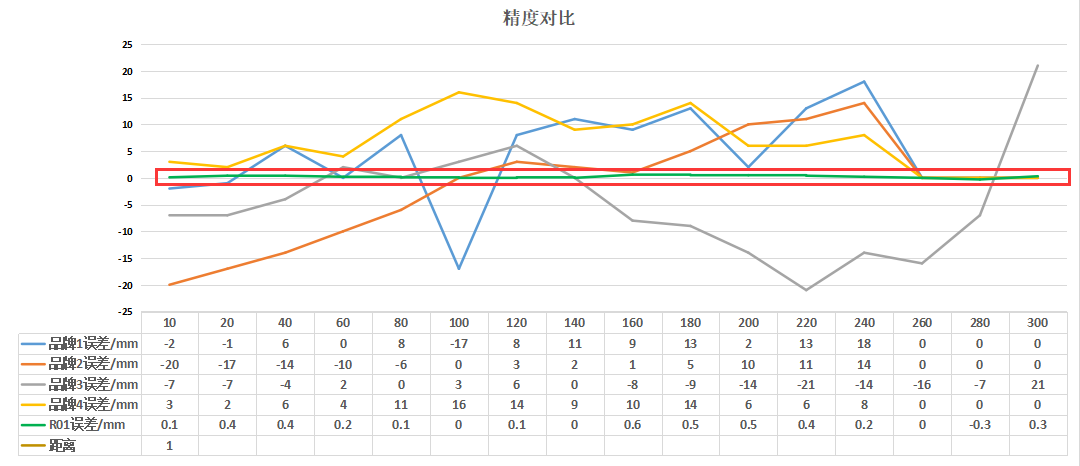
Lè w ap itilize twalèt la andedan kay la, diferan wotè kliyan, rad ak ekipman ka mennen nan chanjman nan distans ki mezire pa Capteur a akòz chenn diferan, ki pral teste presizyon nan mezi distans Capteur a, sa vle di valè erè a.
Grafik ki anwo a sèvi ak rezilta tès presizyon andedan kay la lè l sèvi avèk bwat katon plat, aks orizontal la se distans estanda a, aks vètikal la se distans erè aktyèl la,teste diferan mak detèktè LiDAR,soti nan sitiyasyon an fluctuation done, lalòt 4 mak nan Capteur ranje 3merègengwo fluctuation,mak 1, 2, 4 menm soti nan 260cm ivè pa ka teste done yo.LaR01LIDAR, nan lòt men an, te gen prèske pa gen okenn valè erè nan laranje 3m,ak yonranje maksimòm 440cm.
Sipoze yon senaryo relativman ekstrèm, men posib: yon timoun nan sèlman 1m nan wotè, Capteur a enstale nan yon wotè 2.6m, timoun nan ka deplase kò li retounen ak lide apre akoupi, seri a mezire se nan seri a nan 1.9-2.1. m, si done yo mezire pa Capteur a fluktue anpil, pwobabilite pou fo alam ap vin wo, ki afekte kliyan an twonpe sou maj la akoupi.
03R01Lidar avantaj jeneral
Deteksyon ultra-long distans:4mdistans deteksyon, deteksyon egzat san fo alam oswa deteksyon rate
San pè nan anviwònman an:Nouvo amelyorasyon algorithm nan optimize mezi nan deyò / gwo limyè / orijin refleksyon konplèks
Adapte ak senaryo ki ba pouvwa:sipòte mòd ba-pouvwa, anba a 100mW, siyifikativman pi ba aktyèl pik, plis zanmitay nan sistèm ekipman pou pouvwa a
Pri ki ba:Egzanp pri$6 chakPCS, pri esansyèl se pi favorab
Tan pòs: 23-Nov-2022